¶ Barriers
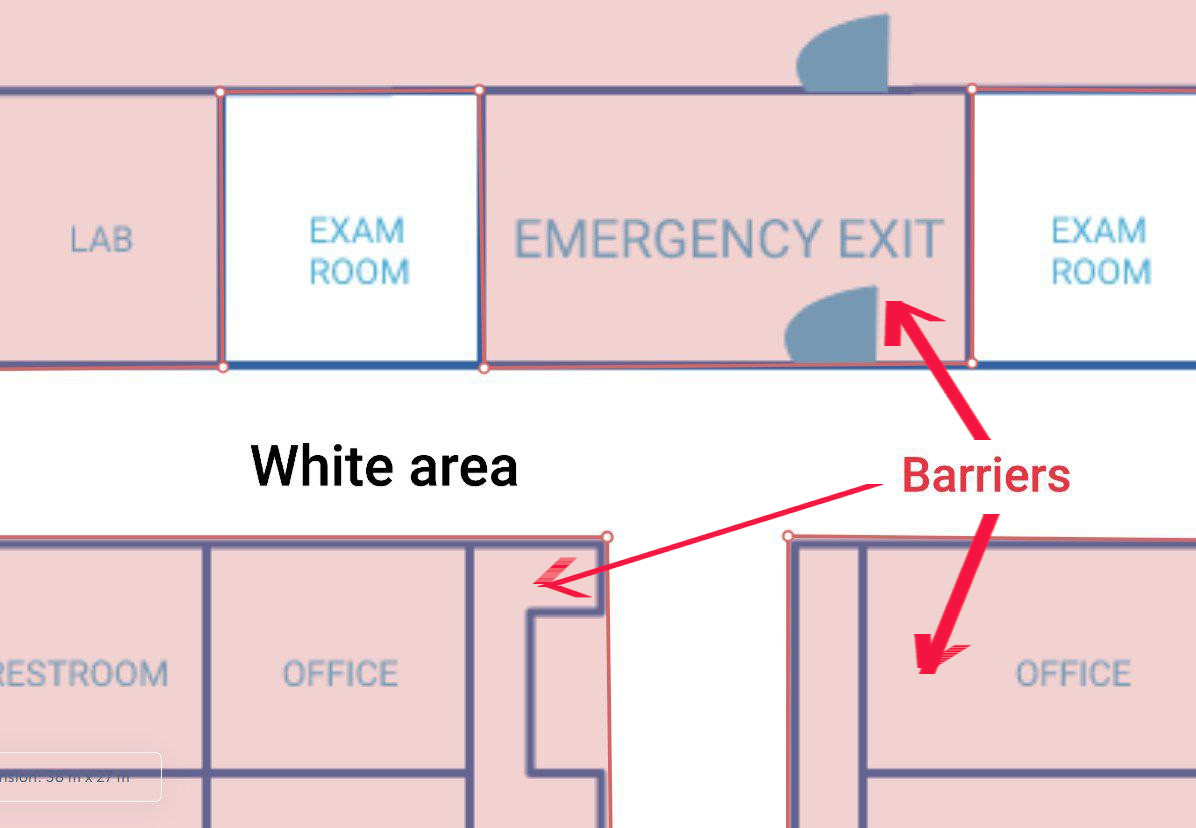
Barriers are obstacles in the physical world that cannot be passed through, such as columns, walls, closed rooms, or areas outside of the building.
A map of location can be divided into two main areas: barriers and a walkable navigational area, where it is possible to move and provide a feasible solution of navigation for a user. This area is called white area in our algorithms.
Barriers have a sufficient importance for a positioning algorithm when it comes to a particle filter. This concept uses particles as a state of a system: each particle is a probabilistic representation of a position and orientation of a user on the location. They are spread over the white area, so a possible solution can be found in a walkable area. That is why it is important to make a reliable set of barriers to be able to get the best solution. Check out the video about Particle filter.
After that the initiation particles are evolving by mutation of the states setting higher weights for the most probable positions on a map. Also since a particle can be generated in a white area, some particles can be placed from the opposite side of a wall.
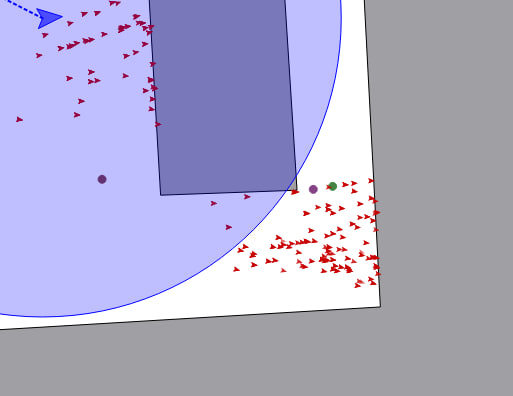
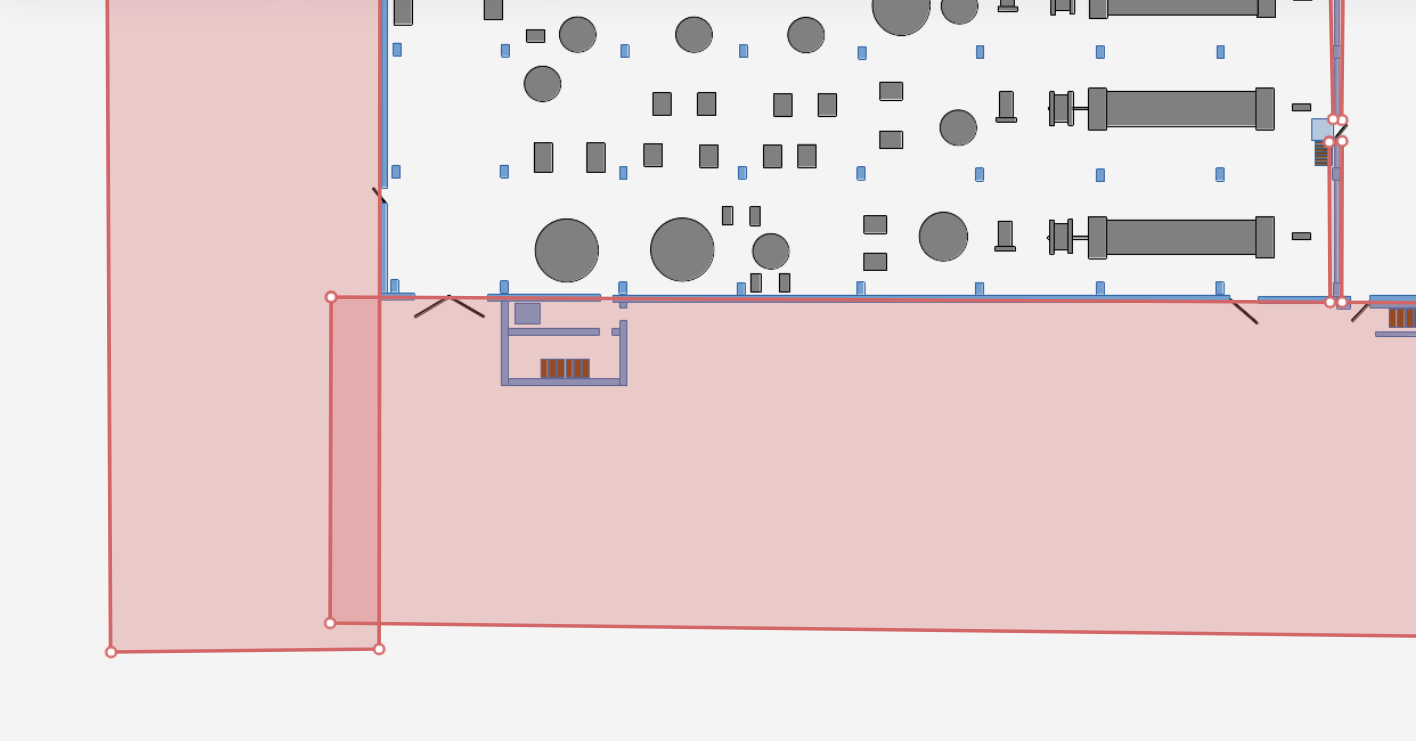
Here one can see that particles are placed from both sides of a wall. The effect of it is that a navigational solution can possibly move through barriers due to a non linear nature of particle filter. That is why it is important to cover all the non walkable areas with barriers also using intersections between them (see p.4 in the next part) in order to prevent unnecessary jumps and improve the quality of navigation. More information about Particle filter can be found here.
'
These gif images represent the difference in navigation with and without barriers. Here one can see that the quality of navigation without barriers is worse than the quality of navigation with them for the reasons described above. The median error has increased from 0.2m to 0.8m and maximum error from 2.9m to 4.7m after removal of the barriers.
¶ How to draw barriers
- To add barriers, activate the "Draw barriers" button in the "Create" section of the toolbar.
- Click on various points on the map to mark the boundaries of the barriers. To move around the map click on the middle mouse button.
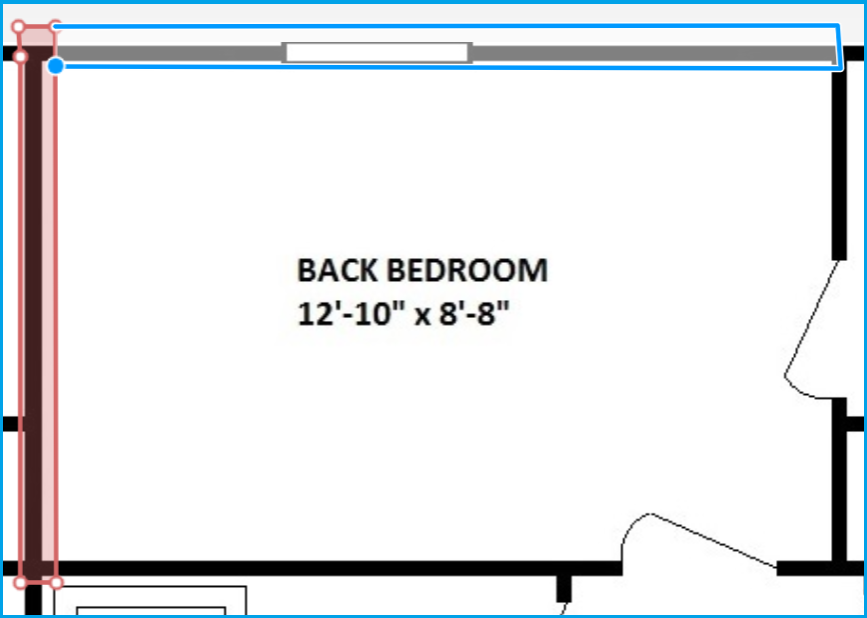
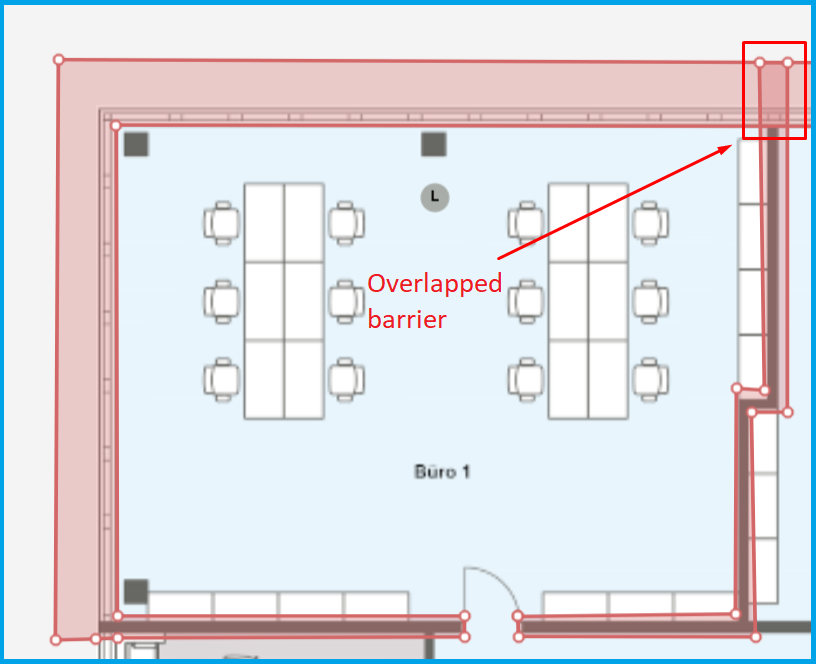
NOTE: When creating a new barrier, ensure that it overlaps with the previous barrier.
Overlapped barrier
- Once the last point is added, either double-click on the map or click the first point to create the closed barrier shape on the map.
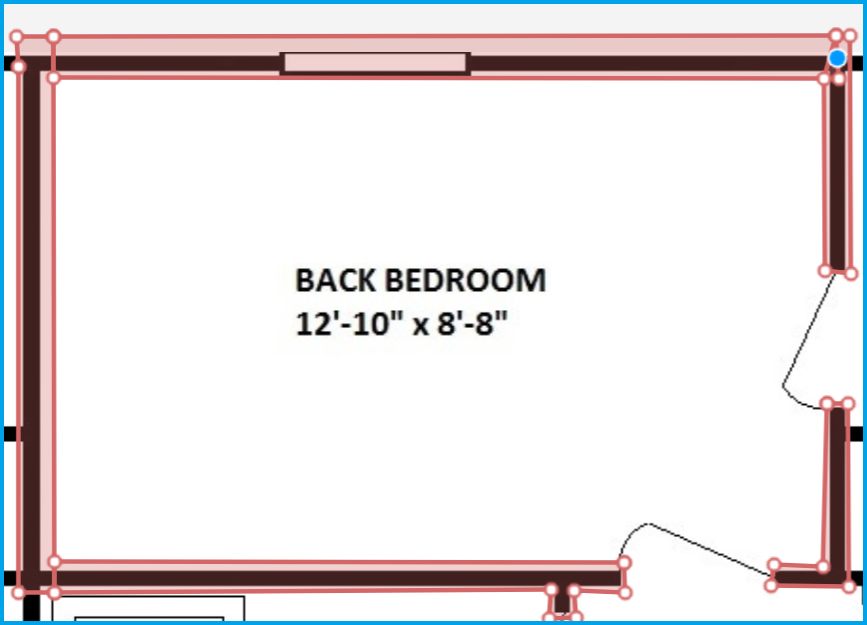
Make sure that the barrier:
- Covers the outer border of the image;
- Covers walls in the navigation area;
- Covers areas where no navigation is expected.
- Click the "Save" button in the top right corner of the toolbar to save the changes.

- Next step for setting up Navigation go to draw route.
¶ Q&A
- Is it necessary to always draw the barriers? What happens if I don't do that?
- It is sufficiently important to draw barriers on a map of a location. As it is indicated in a paragraph above, barriers allow the algorithm to distinguish between walkable area and area withoud navigation. It will look for a solution in an indicated white area, that significantly improves the quality of navigation.
- If there are no barriers specified on the map of a location, the navigational algorithm will eventually converge to a solution with a bad quality navigation. Some particles will be generated inside non-walkable area and it will lead to instability of the navigation and loose of accuracy because the solution in this case can be found in a non-walkable area.